Beating Super Hexagon With Computer Vision
Two great examples of using Computer Vision to beat Super Hexagon.
Super Hexagon is a really hard game. The goal of Super Hexagon is to control a small triangle which circles around a central hexagon (which occasionally collapses into a pentagon or square in the hexagon and hyper hexagon difficulty) attempting to avoid contact with incoming "walls".
First example from Valentin Trimaille's Super Hexagon bot:
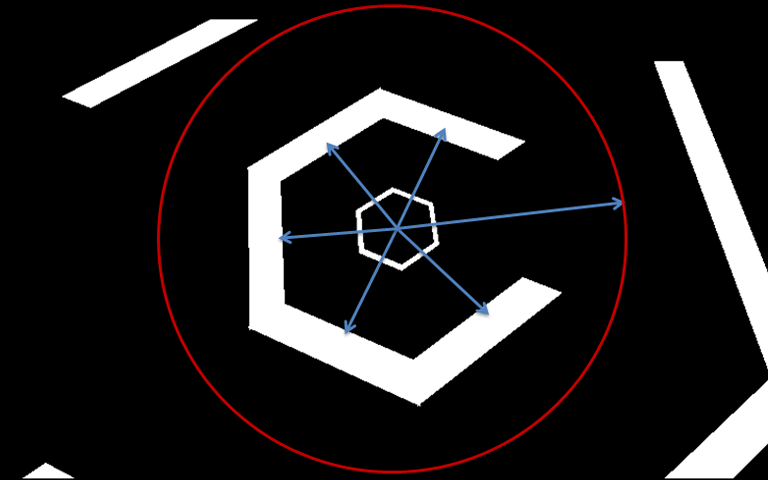
Ray Casting Wall Detection
The point is that a bot for this game makes a really nice image processing project to start learning OpenCV: simple shapes but lots of human disturbing effects, fast-paced game meaning real-time is required, very simple controls: rotate CW or CCW... (full article)
Second example from Shaun LeBron's Super Hexagon Unwrapper:

This project is written in Python. It employs Computer Vision algorithms provided by SimpleCV to establish a reference frame in the image. Then it warps (or "unwraps") the image based on that reference frame, using OpenGL fragment shaders... (github code) (full explanation)
Featured Product

